Funktionsweise Musternavigation
Die Musternavigation stellt seit der Markteinführung den größten Fortschritt unserer Großflächenroboter dar. Durch die Einführung der Technologie können unsere Roboter in Bahnen fahren ohne dauerhafte Spuren zu hinterlassen. Dies sorgt für ein tolles Schnittbild und verdreifacht die Effizienz.
RTK-GPS
Um im linearen Streifenmuster fahren zu können, benötigen wir das hochpräzise RTK-GPS. Die Abkürzung steht für Real Time Kinematic Global Positioning System (GPS) und verbessert die Genauigkeit von mehreren Metern auf 2-3 cm.
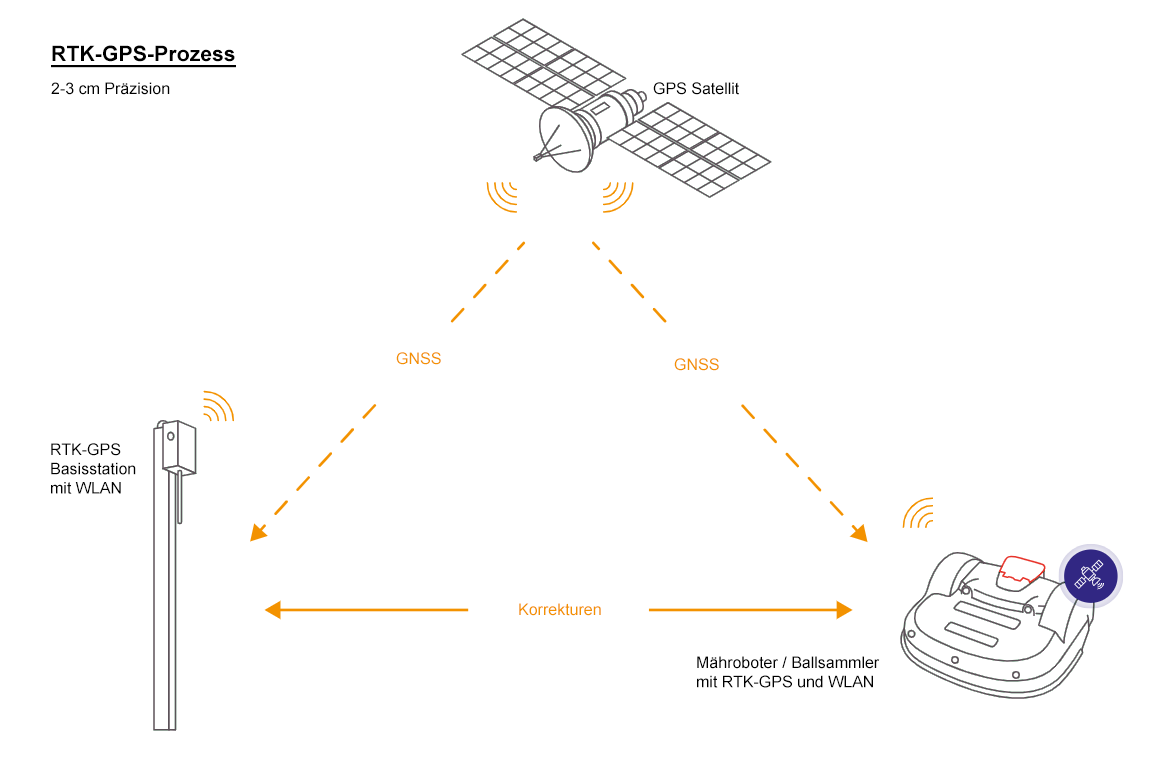
Hierzu wird ein Korrektursignal von einem 2. RTK-GPS-Empfänger an den Roboter gesandt.
Der Vorteil des 2. GPS-Empfängers ist, dass dieser als Basisstation fix installiert und dessen Position somit genau bekannt ist. Des weiteren unterliegt die Basisstation in etwa den gleichen Umwelteinflüssen wie der Roboter.
Hierdurch kann ein Korrektursignal von der Basisstation entweder per verschlüsseltem WLAN-Netz oder LTE-Datennetz an den Roboter übertragen werden.
Vorteile der Musternavigation
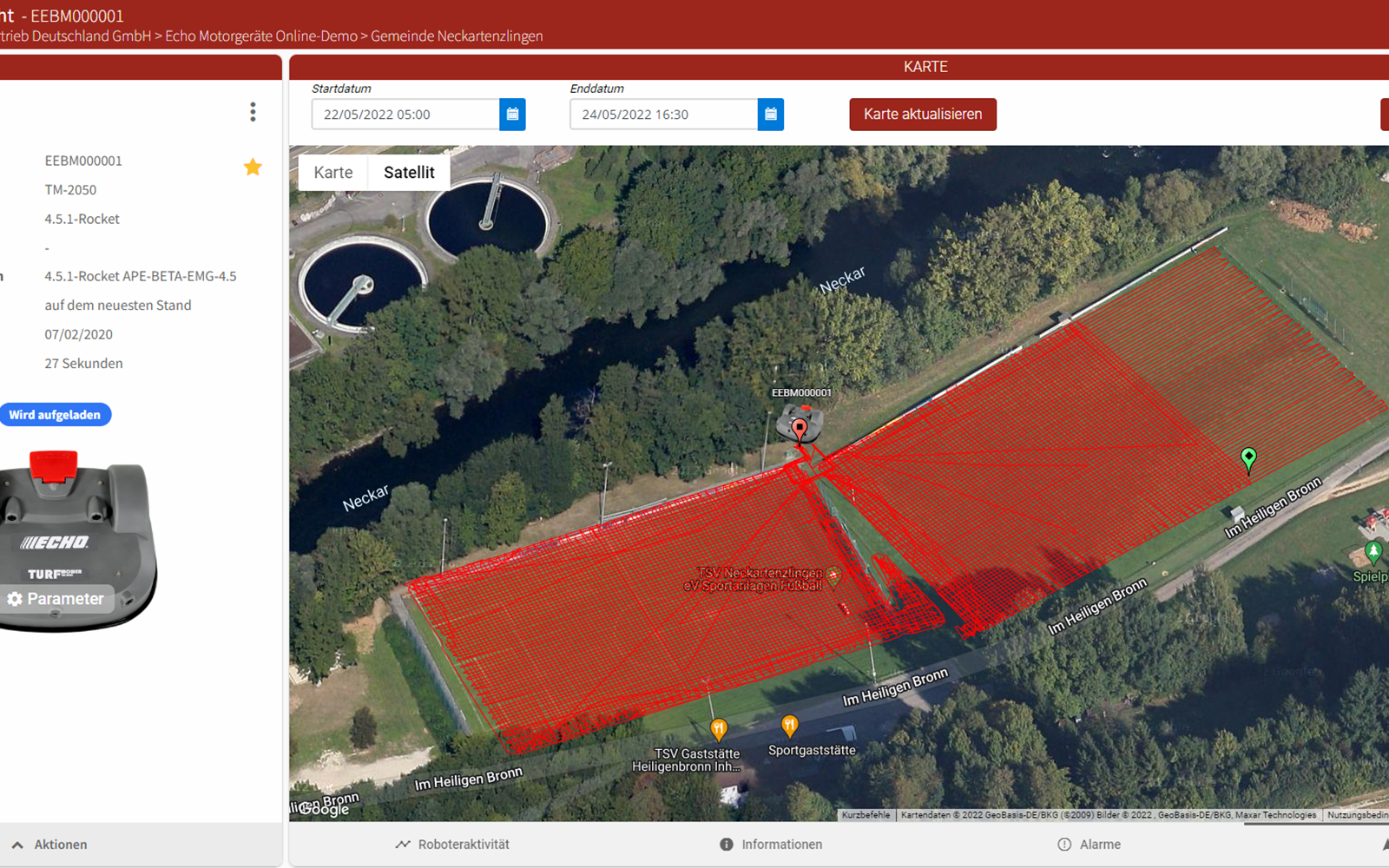
Während bei der herkömmlichen Zufallsnavigation der Roboter statistisch gesehen das gesamte Gebiet innerhalb weniger Tage abdeckt, erledigen unsere RTK-GPS Roboter die Arbeiten systematisch innerhalb weniger Stunden. Hierdurch steht mehr Rasennutzungszeit zur Verfügung. Unverkennbar ist das lineare Streifenmuster, das ansonsten häufig nur in höheren Liegen vorzufinden ist. Durch die regelmäßige Änderungen des Musters kommt es zu keiner dauerhaften Spurenbildung. Darüber hinaus sieht das Gesamtergebnis gleichmäßiger aus. Es wird pro Mähzyklus ein größerer Teil zur selben Zeit geschnitten.
Vorgehensweise unserer Großflächenroboter
Während der Installation werden vom Roboter die Grenzen des Arbeitsbereichs per App, Webportal oder über einen Draht erfasst. Daraus errechnet der Roboter ein Muster, um den gesamten Bereich in geraden Linien abzudecken.
Ist der Akku leer nimmt der Roboter sein Muster am Endpunkt des vorherigen Mähzyklus wieder auf.
Der Bezugspunkt, wo ein Muster beginnt sowie die Musterrichtung ändern sich nach dem vollständigen Mähen der Fläche im Interesse einer optimalen Schnittqualität ohne dauerhafte Spurenbildung standardmäßig um 45° oder 90°.
Das Mähen des Randbereichs erfolgt über den Kantenmodus (wahlweise per Draht oder GPS).
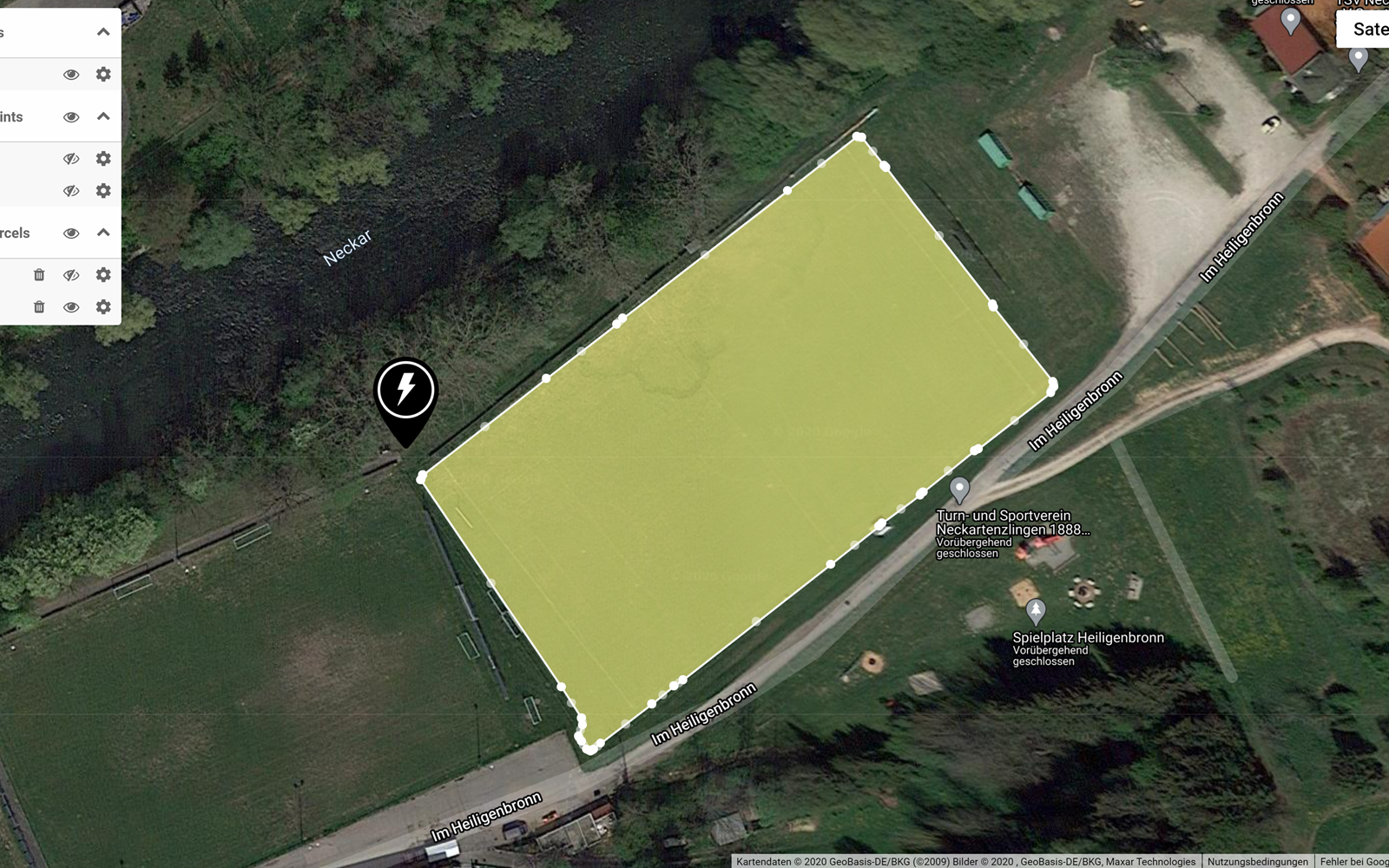
Exakte Musterausrichtung auf den Platz
Die Software von ECHO Robotics ermöglicht es, die Musternavigation egal wie die Formgebung des gesamten Platzes mit etwaigen Nebenflächen ist, perfekt auf den Fußballplatz auszurichten. Die Anzahl der Laufrichtungen und Winkel können vor Ort, per Webportal oder App geändert werden.
Die Musterausrichtung ist ein Feature, das vor allem Amateurvereine schätzen gelernt haben, um vor dem Spiel Längs- und Quermuster zu mähen. Die Muster auf dem Platz vereinfachen Linienrichter die Abseitsbewertung.

Voraussetzung zur Nutzung von RTK-GPS
Eine Voraussetzung zur Verwendung von RTK-GPS ist, dass der Roboter und die Basisstation stets ein freies Sichtfeld zum Himmel haben. Für die Basisstation lässt sich in aller Regel immer gut eine Position auf dem Gelände finden, wo das gegeben ist. Etwas anders zu beurteilen, ist die Situation beim Roboter, da dieser auf der gesamten Grünfläche unterwegs sein soll.
Neben dem Kabellos-Modus, genannt WISENAV, unterstützen wird seit Einführung unserer Mähroboter mit RTK-GPS den Hybrid-RTK-GPS Modus (aus Begrenzungsdraht und RTK-GPS). Hierdurch bieten wir umfangreiche Lösungsansätze für verdeckte Teilbereiche:
- Kleine GPS-Teilverschattungen bspw. unter Ästen von Bäumen: Der Roboter wartetet der im kabellos-Modus kurzzeitig bis neue GPS Satellitenkonstellationen verfügbar sind.
- Bei Vorhandensein des Begrenzungskabels und Einsatz des Hybrid-RTK-GPS Modus kann in kleineren verdeckten Teilbereichen (bspw. nahe einer hohen Baumreihe) der nicht ordnungsgemäße Empfang des RTK-GPS-Signals ignoriert werden. Über einen automatisierten Raddrehmomentabgleich versuchen unsere Roboter die Bahn möglichst präzise zu halten. Erreichen die Roboter den Begrenzungsrand beginnen, sie wie gewohnt die nächste Bahn. Durch die zuverlässige Bestimmung des Bahnendes über den Begrenzungsdraht sind unsere Roboter im RTK-GPS Schattenbereich nicht auf eine ungenaue Abschätzung angewiesen.
- Für größere verdeckte Wegstrecken haben wir die Möglichkeit bei Hybrid-RTK zusätzliche Zufallsnavigationsparzellen aufzuspannen.

Zwei Übertragungstechnologien: WLAN oder 4G für ganze Roboterflotten
Sportvereine setzen in aller Regel auf die herkömmliche WLAN RTK-GPS Basisstation, die über ihren integrierten WLAN-Router eine Empfangsreichweite von bis zu 200 m bietet. Bis zu fünf Roboter können eine WLAN RTK-Basis teilen.
Für das Steuern großer Roboterflotten in Gemeinden, Städten oder ganzen Tälern sowie bei Golfclubs bieten wir alternativ unsere 4G RTK-GPS Basisstation an. Unsere Roboter können in bis zu 15 km Entfernung das Korrektursignal von der RTK-GPS Basisstation nutzen. Bei Einsatz einer 4G RTK-GPS Basisstation fallen zusätzliche 4G Nutzungsentgelte an.
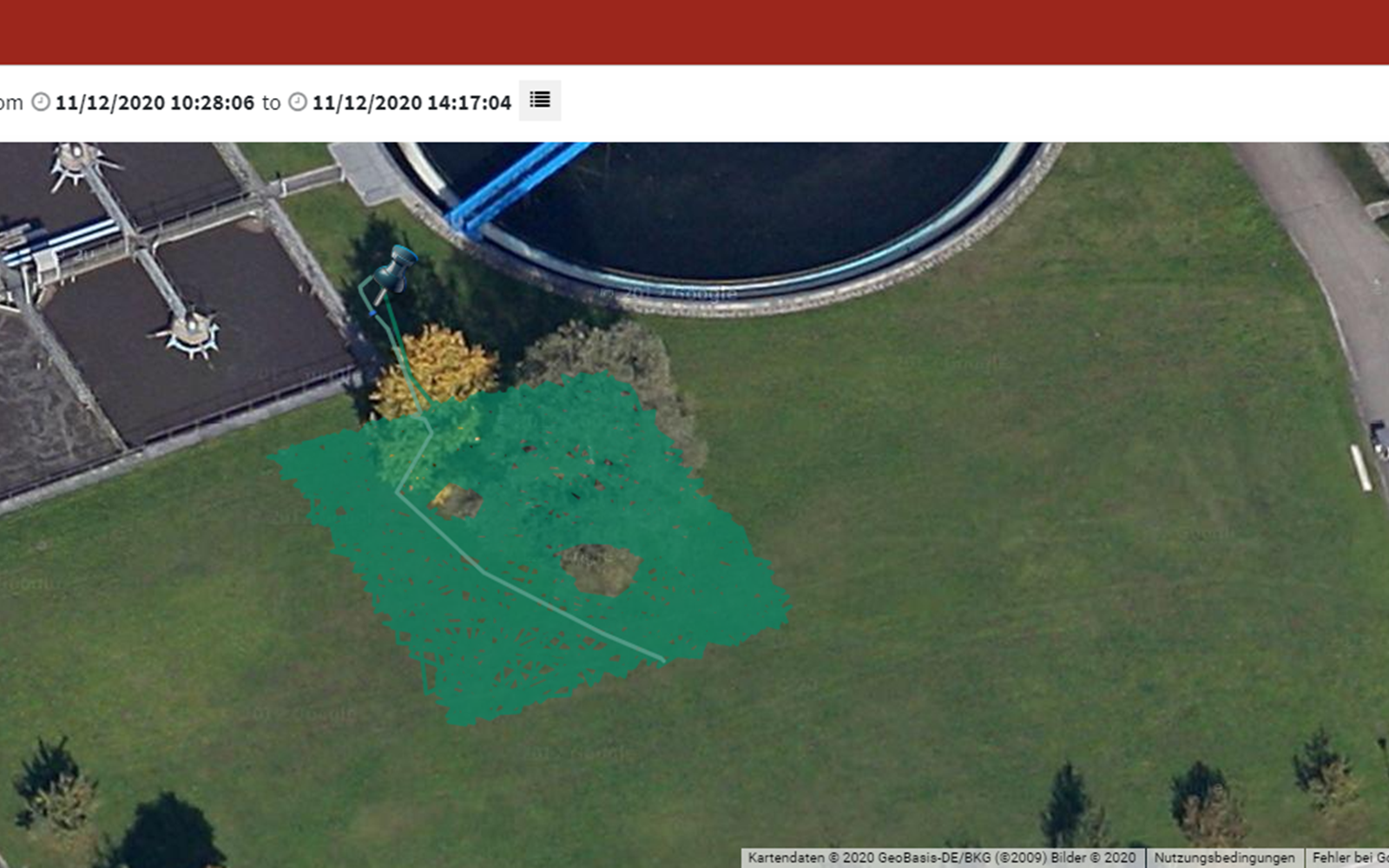
Aufspannen von Zufallsnavigationsparzellen in Arealen ohne RTK-GPS Empfang
Um Hindernisse, wo kein RTK-GPS Empfang möglich ist, kann eine eigene GPS-Parzelle, nach dem herkömmlichen Zufallsmähprinzip eingerichtet werden.
Über die min. und max. Zykluszeit können Sie die Mähdauer auf die optimale Länge einstellen und ein "Übermähen" verhindern.
Fahren sämtliche Großflächenroboter bald ohne Begrenzungskabel?
In unserem Blogartikel erklären wir, wann welches System im Vorteil ist:
